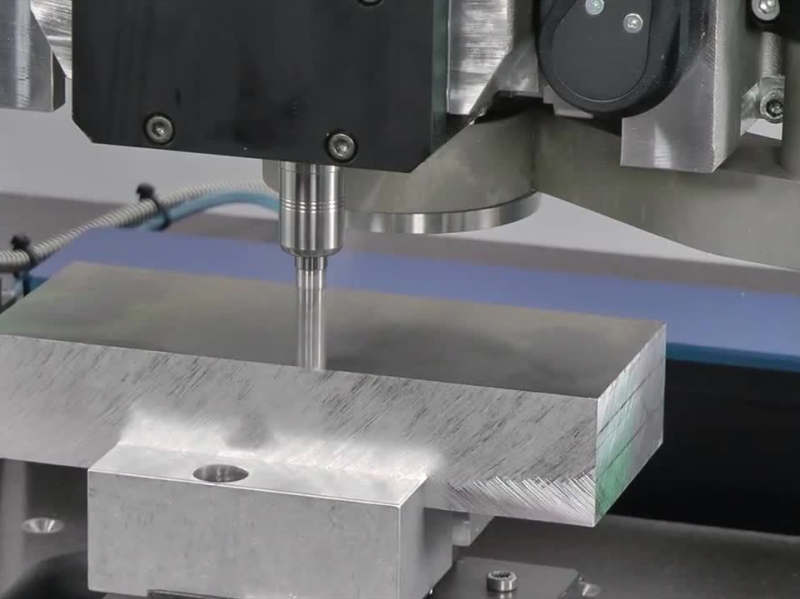
机器人cnc精密加工装备研究与应用

猜你喜欢
-

cnc精密加工滚动轴承超精加工
cnc精密加工 在滚动轴承生产中,超精加工是工件 -

cnc精密加工中小振荡超精加工的特点
cnc精密加工 是一种采用由磨料组成的磨具,即油 -

cnc精密加工虚拟仿真加工环境
cnc精密加工 创建与导入 在对虚拟现实场景实施开 -

cnc精密加工虚拟仿真系统的组成
cnc精密加工 仿真系统的基本构成分为以下几个模
